Photo courtesy of Oshkosh Defense
Cargo Unmanned Ground Vehicle
NREC teamed with Oshkosh Defense to develop autonomous unmanned ground vehicle (UGV) technologies for tactical logistics wheeled vehicles used by the US Marine Corps. The Cargo UGV project’s goal was to mix manned and unmanned logistics vehicles in supply convoys to reduce the drivers’ exposure to danger and free them to perform other duties.
Application
Convoys perform essential logistic and resupply missions. Convoy trucks must do more than just follow each other at a safe driving distance, including meeting the following parameters:
- They must operate in an enormous range of environments – cities, villages, open country, mountains and more.
- They must navigate unmarked dirt and gravel roads with treacherous ruts, holes and washouts.
- They must drive safely through rain, snow, dust and smoke; all of which obscure visibility and interfere with sensors.
- They must operate safely around personnel and avoid collisions with stopped and moving vehicles, including other convoy traffic.
- They must be able to flexibly switch between autonomous, remote and normal driving.
Cargo Unmanned Ground Vehicles (Cargo UGVs or CUGVs) are designed for autonomous use in convoys that combine manned and unmanned vehicles. An operator in another vehicle supervises one or more unmanned vehicles, which drive autonomously in convoy formation day and night, in all weather, and when dust and smoke limit visibility.
Capabilities
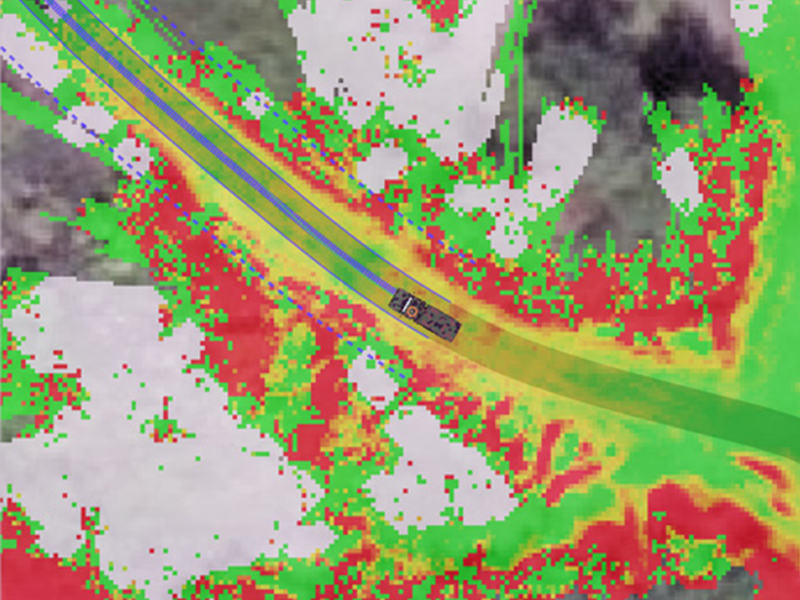
Perception
Cargo UGV’s advanced perception system is specifically designed to support autonomous vehicles driving in convoys on unimproved roads. The perception system uses multiple sensors (ladars, cameras, radars) to perform multiple assessments of its environment. The perception system must:
- Detect obstacles, both static (trees, rocks) and dynamic (pedestrians, other vehicles).
- Estimate the ground surface to determine where the vehicle can or cannot drive.
- Detect airborne obscurants such as dust, precipitation and smoke.
- Estimate visibility information for the motion planner to estimate a safe driving speed.
- Classify the terrain using the information above to determine whether if an area of the map is foliage, dust, obstacles or ground.
- Register map location to enable the Cargo UGV to autonomously navigate for extended periods of time through GPS-limited or denied areas.
Planning
The planning software system guides and controls Cargo UGVs through the environment and performs several tasks before, during and after the mission. The planning system performs the following:
- Motion Planning: It uses information from the perception system to smoothly control the vehicle’s throttle, steering and braking.
- Global planning: It carries out convoy missions, calculates the shortest route, sets the specified vehicle spacing and specifies speed limits and other constraints.
- Local planning: It generates short-term movement trajectories, follows the lane of the road, and avoids areas with dangerous terrain. It also calculates a smooth trajectory to avoid obstacles.
- Speed planning: It sets the Cargo UGV’s speed based on current road and visibility conditions (curves, rough roads, dust and slopes).
- Traffic planning: It follows a set of behavior-based rules for interacting with traffic and other moving obstacles that it tracks.
- Learning: It uses machine learning to improve its performance. It can learn from human drivers or from previous missions. This allows Cargo UGVs to easily adapt to new and unfamiliar surroundings.
Other Videos
Cargo UGV on BBC's "Miracles of Nature"
Cargo UGV Overview
Photos