Defense
NREC brings innovative robotics technology to warfighters and military operations. Since 1995, NREC has been working with Department of Defense clients including DARPA, AFRL, TARDEC, USMCWL, OSD TRMC, NAVEODTECHDIV, PM Night Vision RSTA, USACE, JGRE, ONR, US Army, US Air Force and others. An impressive roster of projects and awards highlights NREC's mission to "engineer robotics solutions." NREC constantly pushes the boundaries of what's possible and can solve your most challenging operational, tactical or logistic capability gaps.
Capabilities
Autonomous Vehicles
From inspection robots to tactical vehicles
Equipment and Site Monitoring
Detection of abnormal situations or intruders
![]()
ISR
Teleoperation
3D Teleoperation and S.A. from around the globe. Latency compensation and bandwidth management
GPS-Denied Navigation
Warfighter localization and vehicle navigation
3D Mapping
Accurate, real-time mapping of tunnels, roads and cities
Safety Systems
Safety components, architecture, testing and evaluation for complex autonomous systems
Vehicle Design
Superior mobility from 15-lbs to 15-tons. Wheels or tracks. Hybrid electric and custom drivetrain
Applications
Off-Road Autonomy
Unmanned Convoy
Route Clearance
Tunnel and Building Inspection and Mapping
Manned and Unmanned Teaming
Logistics Operations
Perimeter Security
Depot and Maintenance Automation
Featured Projects

Stress Testing for Autonomous Systems
Finds autonomy system safety problems that are unlikely to be discovered by other types of tests.

Cargo Unmanned Ground Vehicle
NREC teamed with Oshkosh Defense to develop autonomous unmanned ground vehicle technologies for logistics tactical wheeled vehicles used by the US Marine Corps.
![]()
Autonomous Route Clearance
NREC and Oshkosh Defense adapted Cargo UGVs to detect and clear explosives from convoy routes.

Laser Coating Removal for Aircraft
The Air Force Research Laboratory (AFRL), Concurrent Technologies Corporation (CTC) and NREC developed an environmentally friendly system to remove coatings from U.S. Air Force aircraft.
Other Defense Projects

3D Visualization for EOD Robots
NREC developed a plug-and-play camera and range finder module that assists Explosive Ordnance Disposal (EOD) Technicians during robots operation and manipulation.

ARMOR 1
NREC is engineering an automated robotic system for the U.S. Army Corps of Engineers to perform “revetment” operations along the Mississippi River. The system is called “Armor One.”

Autonomous Platform Demonstrator
NREC’s Autonomous Platform Demonstrator (APD) is a 9-ton, skid-steer unmanned ground vehicle (UGV) with extreme off-road mobility and the ability to drive up to 80 kph.

Black Knight
NREC developed sensing, teleoperation, and autonomy packages for BAE Systems' Black Knight, a prototype unmanned ground combat vehicle (UGCV).

Crusher
NREC designed and developed the Crusher vehicle to support the UPI program's rigorous field experimentation schedule.

Demining Augmented Reality
NREC has developed an augmented reality training system for hand-held land mine detectors. It is implemented using a pair of custom-designed stereo cameras with onboard visual-inertial odometry tracking paired with a commercially available augmented reality headset.

Dragon Runner
NREC’s Dragon Runner is an ultra-rugged, portable, lightweight reconnaissance robot used by the U.S. Marine Corps in Operation Iraqi Freedom (OIF) for urban reconnaissance and sentry missions.
Enhanced Teleoperation
NREC developed Enhanced Teleoperation: a real-time 3D video system to improve situation awareness in teleoperation and indirect driving of unmanned ground vehicles in complex environment.
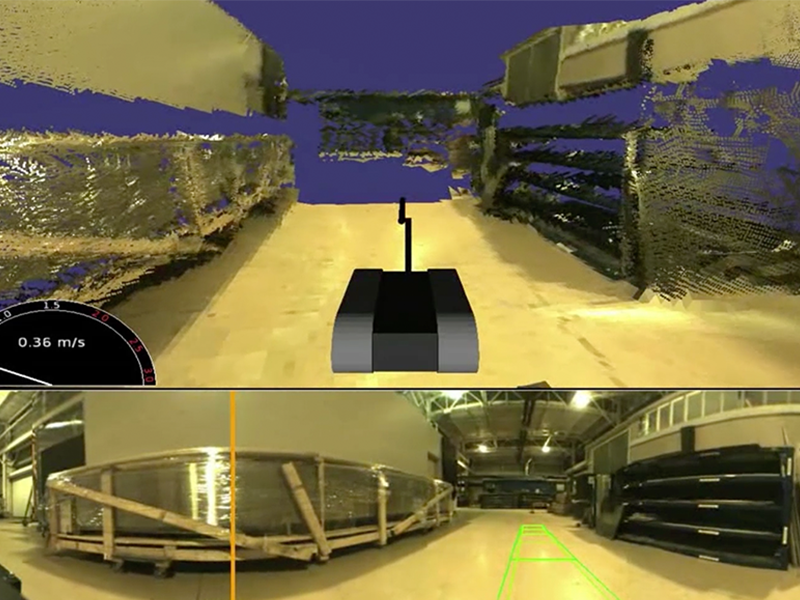
Enhanced Teleoperation - Mini SACR
NREC’s miniaturized Situational Awareness Through Colorized Ranging (SACR) system fuses video and range data from a small panoramic camera ring and scanning LADAR sensor.

EOD Robot Operator Assist
Explosive Ordnance Disposal (EOD) Robot Operator Assist gives EOD robots the ability to navigate intelligently to their targets.

Infantry Support
NREC designed, developed, field tested and successfully demonstrated a high-mobility tactical unmanned ground vehicle (TUGV) for the United States Marine Corps.

Learning Robots
NREC designed, built and delivered 12 robots for the Learning Applied to Ground Robots (LAGR) DARPA program.
Long Distance Teleoperation - Avatar
The Avatar technology allows operators to drive robots at higher speeds and with greater safety at nearly unlimited stand-off distances, opening new applications for robotics.

Negative Obstacle Detection
NREC is developed a perception system to accurately detect negative obstacles in the path of an unmanned vehicle (UGV).

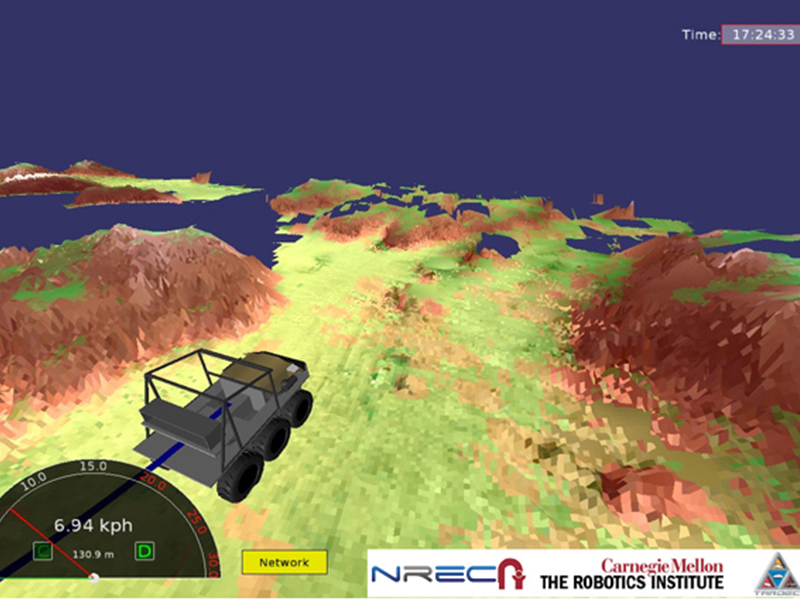
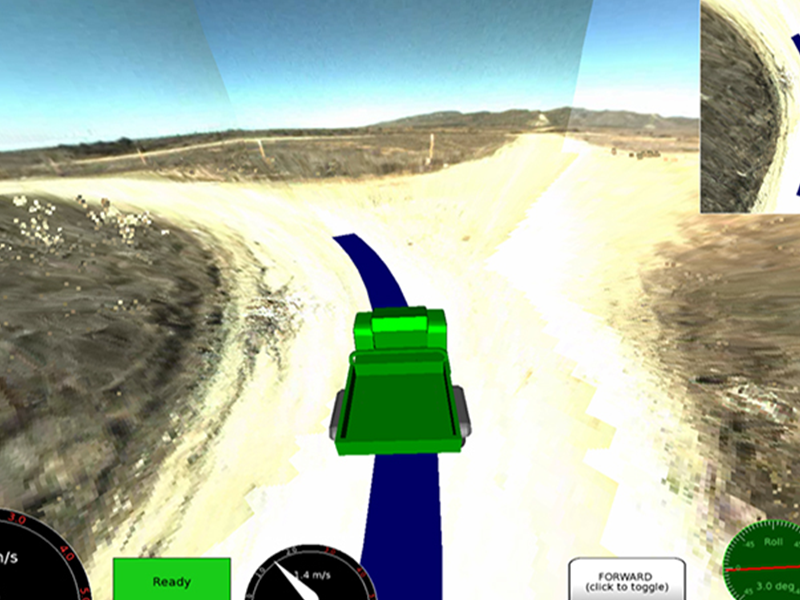
Off-Road Autonomy
NREC developed an autonomous navigation system for large scale, unmanned ground vehicles (UGV) operating autonomously in a wide range of complex, off-road terrains.
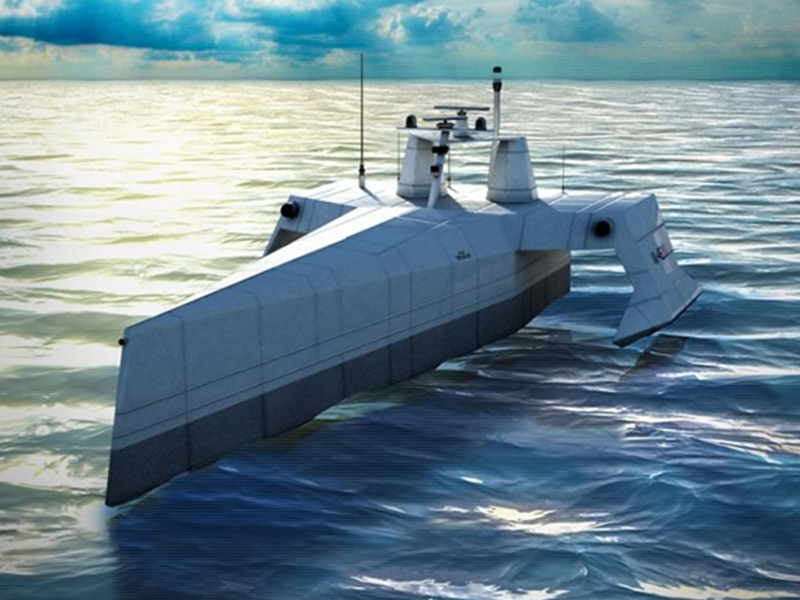
Path Planning for Autonomous Vessel
NREC developed a path planner for the Anti-Submarine Warfare Continuous Trail Autonomous Vessel (ACTUV).

Perception for LS3
NREC’s sensor system for DARPA’s Legged Squad Support System (LS3) enables LS3 to perceive its surroundings and autonomously track and follow a human leader.

Spinner
An NREC-led team delivered technical breakthroughs in mobility, mission endurance and payload fraction with the development of Spinner an unmanned ground vehicle.

Sweep Monitoring
NREC has developed for US Army Research Office and CECOM (US Army Night Vision Lab) the Sweep Monitoring System (SMS) for training soldiers and demining personnel to use hand-held land mine detectors.

Tartan Rescue Team
CHIMP is the 3rd place winner of the DARPA Robotics Challenge, which drove the development of robots with human-like capabilities for disaster response. CHIMP successfully completed eight tasks in less than 60 minutes.

UGV & UAV Collaboration
NREC and Sikorsky Aircraft paired an autonomous ground vehicle with an unmanned helicopter to autonomously survey sites for radiation, biological or chemical contamination.

Urban Challenge
Carnegie Mellon University/NREC and General Motors built an autonomous SUV (named "Boss") that won first place in the 2007 DARPA Urban Challenge, 20 minutes ahead of the 2nd place finisher.