Learning Robots
NREC designed, built and delivered 12 robots for the Learning Applied to Ground Robots (LAGR) DARPA program. The LAGR robot includes all the necessary hardware, sensing and software for autonomous operation indoors or outdoors. Its well documented Application Program Interface (API) and modular design allows for partial or total swap of the autonomy software modules with the owner’s software. Its design features long battery life, standard development environment, extensive data logging capabilities, and system simulator.
NREC supported more than a dozen customers with 30 fielded robots and provided remote technical support, spare parts supply, and user training.
Application
The goal of the LAGR program was to develop a new generation of learned perception and control algorithms to address the shortcomings of current robotic ground vehicle autonomous navigation systems, with an emphasis on learned autonomous navigation.
In just seven months NREC designed and built 12 LAGR robots. This allowed DARPA to hold the LAGR kick-off meeting on time and to provide each research team with a fully functional autonomous platform for development.
Teams were given 4 hours of training at kick-off and were able to program basic obstacle avoidance capability the same day. Developers were able to focus immediately on learning algorithm research because all basic autonomy capabilities along with well documented APIs were provided with delivery.
Capabilities
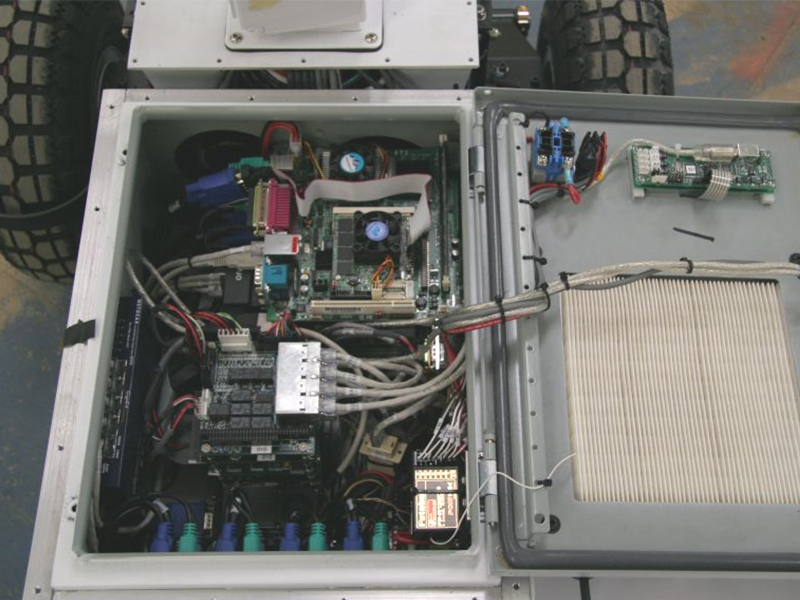
- The LAGR robot includes three computers, stereo cameras, IR rangefinders, GPS, IMU, encoders, wireless communications link, and operator control unit.
- To provide baseline autonomous capability, each platform runs NREC’s base autonomy software.
- For on-board communication, the robots include Gigabit Ethernet, a wireless Ethernet communications link, remote monitoring software that can be run on a laptop, and a standalone radio frequency remote.
- The user can log data on the robot in three different modes: teleoperation via the RF remote; teleoperation via the onboard computer system (OCS); and via autonomous operation.
Photos